ModelPlan 151
£12.40
Eric Taylor's
Giant Level Luffing Crane

In 1967 Bert Love photographed Eric Taylor's model in great detail and issued it as MMG Supermodel No.1, incorporating Eric's instructions.
Since Eric's and Bert's death, all photographs and details of the model were acquired from Betty and Colin Love by Jim Gamble.
Thanks to his kindness, we are able to publish it as ModelPlans 151.
ModelPlan 152
£13.20
Phil Ashworth's
Fully Automated Rotawheels
Information has also been kindly contributed by Jim to enable us to produce Phil Ashworth's "Rotawheels -an electrically driven self-programming model of an exciting Fairground machine", originally Bert's MMG Supermodel No.3, as our new ModelPlans 152
ModelPlan 153
£7.00
Dave Heathcote's
A Simple Meccano Robot

The majority of Meccano robots are complicated constructions. Transvaal Meccano Guild member Dave Heathcote's robot is noteworthy for its simplicity and is the subject for Peter Matthews's latest ModelPlan in IsoMec. Sections include:-• Wiring the Robot • Support Base with Motor • Rotating Column complete • Robot Arm right and left sides • Grab Support Arm • The Grab The Parts list enumerates the parts required for each sub assembly of the model. Power is provided by five standard Meccano motors.
ModelPlan 154
£6.40
Tony Parmee's
Gantry Crane

Based on the massive gantry cranes in Harland & Wolff's Belfast shipyard, Tony Parmee's model is almost 8ft. long and 5ft high, yet can be built with a No.10 outfit. It is assembled in three parts - boom, portal leg and frame leg. Illustrated by four colour pages, the instructions include:-
• Boom
• Mechanism including gantry travel and hoist drives
• Motor electrical leads
• Frame leg and portal leg towers
• Operating hints
A Parts list is included.
ModelPlan 155
£7.80
Ralph Rigg's
1890's Blocksetting Crane

The inspiration for this freelance model came from an illustration of a Ransomes and Rapier "All-Round Titan" shipped out to Warrnambool, N.S.W., Australia in about 1890. The model comprises a Gantry, made up of a wheeled section, a tower section above with a square top. On top of the gantry is The Slew Ring which supports the Boom (or jib). Two heavy duty motors are required for the traverse and slew motions, and two light duty motors for the drums. The instructions are illustrated by a selection of eleven large coloured photographs of the model.
ModelPlan 156
£6.25
Michael Whiting's
Satunilabe - A Saturn Orrery
A Set 10 Model

The model shows the 5 largest moons of Saturn as well as the planet itself (rotating) and a representation of the rings. The period of the rings' revolutions varies not only from ring to ring but also within rings, the tiny particles within the rings behaving as mini moonlets with outer particles having a longer revolutionary period. In the model the ring shown has the same period of rotation as Saturn, roughly corresponding with the prototype.
ModelPlan 157
£19.95
Michael Adler's
Copley Clock
John Harrison's Third Marine Chronometer

Started in 1740, H3 took Harrison nearly nineteen years to build and adjust. He found that he just could not persuade the two large, heavy, circular balances to keep time well enough. Nevertheless, H3 incorporates two extremely important inventions both relevant today: the bimetallic strip (still in use worldwide in thermostats of all kinds) and the caged roller bearing, a device found in almost every modern machine, Michael Adier has named his Meccano version of H3 in honour of the Copley prize awarded by the Royal Society to John Harrison in developing navigation clocks. Contents include sections on:-
• The development of the Marine Chronometer.
• H3 - Harrison's third marine Chronometer and its technology.
• The Meccano Copley Clock, with highly detailed building instructions.
• Nineteen diagrams in IsoMec including six in coloured 'VirtualMec'
• Seven photographs in colour of the finished clock
Also available on CD. Michael Adler's Clocks on CD.
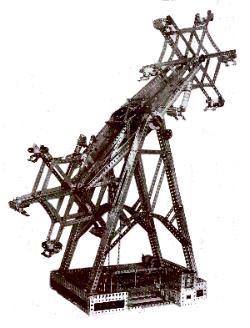
ModelPlan 158
£9.00
John Ince's
Two Cranes
One Tower, One Dockside
The tower crane model may be built with a No 10 set with the addition of extra parts especially P/N 2 where an extra 50 are needed, and an additional 8 each of P/N 3, P/N 9b, P/N 12c and P/N 16b together with 18 of P/N 48a. The completed model stands just over 2m tall. The dockside crane represents a type which years ago was a common sight in every port. Although not based on an actual crane, it is about 900mm tall and its tower has Flanged Wheels so that it may traverse on its own rail track. The tower legs are spread so that a railway track may pass under the crane. The crane jib has a short hammerhead to extend the reach. The hoist rope is sheaved three times between the masthead and the jib so as to achieve the level luffing feature. The driver's cabin is well forward to allow good view of the operation. Both cranes employ three small motors in the machine room and are very suitable for operation manually or automatically. Instructions are included for operation by the Meccanisms "Motorvator". ModelPlan 158 covers 20 pages and is fully illustrated with both black & white and colour illustrations.
ModelPlan 159
£14.00
Tony James'
Sliding Bed Car Recovery Truck

This model is a 1/10 scale version of a 2001 Ford IVECO truck with a Champion y/i ton slide bed, built as near as Meccano and the restrictions of a number ten set allow, the only extra being an electric motor. A two speed and reverse gear box is fitted, driving a strong pinion type differential. A power take-off supplies the sliding platform, the tilt and locking mechanism and the loading winch. The sliding platform stops automatically at each end of its travel. The IVECO crew cab is Meccano friendly, being much 'squarer' than its contemporaries. Instructions for a simple van "load" are included, using some of the parts remaining in the set. A complete list of parts required is included.
ModelPlan 160
£7.25
Michael Whiting's
Planetarium
A Set 10 Model

Planetarium is a specific name for an orrery which contains the Sun and all known planets. Orreries were first built in the early eighteenth century; of necessity they did not include Neptune (discovered 1846) and Pluto (discovered 1930). Latterly of course many other bodies have been discovered in our Solar System. It is thus quite possible to be a pioneer in the field of orreries by constructing a 'first* - the subject of this Modelplan which includes Quaoar, discovered in 2002. Quaoar (pronounced kwa-whar) orbits the Sun in a near perfect circle with a period of 288 years. It has a diameter of about 1300 km - more than half the diameter of Pluto. Quaoar dwells in the Kuiper Belt, an icy debris field of comet-like bodies extending 5 billion km beyond Neptune's orbit. A further large body -Sedna - was discovered in the Kuiper Belt in November 2003, but this is not very interesting for the Meccano modeller as its period is about 10,500 years and its progress would be very slow in any Meccano model. It was noted in MP156 that the Saturnilabe was an attempt to show that quite a complex orrery could be achieved with the relatively modest collection of gears in Set 10; this present Planetarium must be close to the ultimate in this regard as almost all of the gears and sprockets in Set 10 are used and still the desirable aim of accuracy to 1 has been achieved.